

El robot nada moviendo todo su cuerpo hacia adelante y hacia atrás de forma ondulada con una frecuencia de hasta aproximadamente 10 veces por segundo.
Ingenieros mecánicos de la Universidad de Virginia y los biólogos de la Universidad de Harvard crearon el primer pez robótico que puede moverse tan rápido como un pez real y, por si fuera poco, nadar más rápido que la mayoría de los otros robots similares.
Se trata de un modelo diseñado a partir de un atún y que puede nadar extremadamente rápido con alta eficiencia energética, imitando además el movimiento natatorio de esos peces. Incluso, ha logrado ser más rápido que ellos.
Este robot nada moviendo todo su cuerpo hacia adelante y hacia atrás de forma ondulada con una frecuencia de hasta aproximadamente 10 veces por segundo, obteniendo así una gran velocidad.
Un artículo titulado “Robótica del atún: una plataforma experimental de alta frecuencia que explora el espacio de rendimiento de los peces nadadores”, se publicó el 18 de septiembre en la revista Science Robotics, dedicada a los avances tecnológicos en ciencia e ingeniería, y destaca el nado rápido de este prototipo que emula el atún claro y la caballa atlántica.
El Tunabot
Como es lógico, los creadores lo han llamado “Tuna-bot”. Está diseñado para imitar el movimiento de un atún adolescente, pero sin ninguna otra aleta que la cola, y mide unos 25 .5 centímetros de largo, 4.9 centímetros de grosor y 6.8 centímetros de alto.
Según los científicos, este robot atún es más pequeño que un atún real, que naturalmente puede crecer aún más.
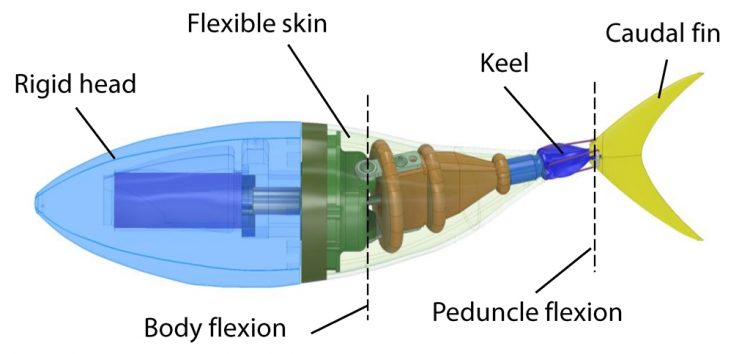
A juzgar por la imagen que han compartido los investigadores, se puede apreciar la apariencia del Tunabot: Comienza con una cabeza rígida de plástico, impresa con tecnología 3D, unida a un mecanismo que mueve el cuerpo del pez y un motor que oscila regularmente el abdomen.
La estructura del tuna-bot es plástica, rígida y realizada también con impresora 3D. La piel está hecha de un material similar al caucho de 1,5 milímetros de espesor.
De acuerdo con el artículo de Science Robotics, los constructores prestaron especial atención al abdomen del Tunabot, pues allí se encuentra la aleta caudal que transmite una gran parte de las fuerzas al agua cuando nada.
La aleta caudal está unida al abdomen con un mango delgado, que en sí tiene aletas laterales horizontales muy finas, que proporcionan estabilidad al robot.
Alto rendimiento
Para demostrar su eficiencia, los investigadores colgaron el atún robot en un recipiente con agua y probar además su comportamiento de natación.
En las pruebas el Tunabot pudo mover su cola hacia adelante y hacia atrás con una frecuencia notablemente alta de 15 Hz; es decir, 15 veces por segundo. Alcanza una velocidad de 4 veces su altura por segundo, por lo que aproximadamente se mueve 1 metro por segundo.
Este es un rendimiento impresionante, pero a esta velocidad el pez robot no está nadando de la manera más eficiente. Ese punto está a 0.4 metros por segundo. Con una carga de batería de 10 vatios-hora, los peces podían nadar a más de 9 kilómetros de distancia. A su velocidad máxima de 1 metro por segundo, está a solo 4,2 kilómetros de distancia.
Tecnología inspirada en los peces
El proyecto de atún robótico nació de una Iniciativa de Investigación Universitaria Multidisciplinaria de 7, 2 millones de dólares que la Oficina de Investigación Naval de Estados Unidos otorgó a Bart-Smith para el estudio la natación rápida y eficiente de diferentes peces. En 2008, Bart-Smith recibió un premio de $ 6.5 millones para desarrollar un robot submarino inspirado en una manta raya.
El objetivo del proyecto de Bart-Smith es comprender mejor la física de la propulsión de los peces, una investigación que eventualmente podría informar el desarrollo de la próxima generación de vehículos submarinos, impulsados por sistemas similares a los de los peces mejor que las hélices.
Los robots submarinos también son útiles en una variedad de aplicaciones, como defensa, exploración de recursos marinos, inspección de infraestructura y recreación.
Sin embargo, mucho antes de que los sistemas de propulsión bioinspirados se vuelvan viables para uso público y comercial en vehículos tripulados y no tripulados, los investigadores deben ser capaces de comprender de manera confiable cómo los peces y otras criaturas se mueven a través del agua.
“Nuestro objetivo no era solo construir un robot. Realmente queríamos entender la ciencia de la natación biológica. Nuestro objetivo era construir algo en lo que pudiéramos probar hipótesis en términos de lo que hace a los nadadores biológicos tan rápidos y eficientes», dijo Bart-Smith».
Dado que el equipo primero necesitaba estudiar la mecánica biológica de los nadadores de alto rendimiento, el profesor de biología de Harvard George V. Lauder y su equipo de investigadores midieron con precisión la dinámica de natación del atún aleta amarilla y la caballa.
Utilizando esos datos, se construyó un robot que no solo se movía como un pez bajo el agua, sino que golpeaba su cola lo suficientemente rápido como para alcanzar velocidades casi equivalentes.
Luego, los creadores compararon el robot que llamaron «Tunabot» con especímenes vivos.
“Hay muchos documentos sobre robots de peces, pero la mayoría de ellos no tienen muchos datos biológicos. Así que creo que este documento es único en la calidad tanto del trabajo robótico como de los datos biológicos unidos en un solo documento «, dijo Lauder.
«Lo que es fantástico con los resultados que presentamos en el documento son las similitudes entre la biología y la plataforma robótica, no solo en términos de cinemática de natación, sino también en términos de la relación entre la velocidad y la frecuencia del latido de la cola y el rendimiento energético», Dijo Bart-Smith.
«Estas comparaciones nos dan confianza en nuestra plataforma y su capacidad para ayudarnos a comprender más sobre la física de la natación biológica«, agregó.
Mientras que la biología puede inspirar una plataforma robótica de alto rendimiento, el desarrollo de dicha plataforma también brindará la oportunidad de estudiar experimentalmente tanto la natación de alta velocidad como la función de las características únicas de este tipo de peces.
De esta forma, se crea un marco para combinar características biológicas y robóticas que ayude a optimizar las capacidades de los propulsores no tradicionales de vehículos submarinos, «de manera utilitaria y científicamente relevante».
Sigue leyendo:


Hazte socio 👍
Con tu donación aportas a la sostenibilidad económica y existencia de este medio.
Elige cómo quieres aportar a la existencia y financiamiento colectivo de este medio!
 Reveniu
Reveniu 









